最新推荐文章于 2025-03-14 16:42:15 发布
转载 于 2024-10-02 00:09:58 发布·1k 阅读
·
 0
0
·
 3·
3·
本内容遵循CC 4.0 BY-SA版权协议
原文链接:https://mp.weixin.qq.com/s?__biz=Mzg2NzUxNTU1OA==&mid=2247631469&idx=3&sn=545eeb80f0a3bf0bd9fef258e503ea88&chksm=cf06b4cb4a0bdc53c29f09281d112ad6ae2c7ea6aafde376953bd5aca87a09fbbe2746511d37&scene=126&sessionid=0
收录于
 DAMO开发者矩阵
DAMO开发者矩阵
当前文章被该社区收录:
DAMO开发者矩阵
文章已被社区收录
加入社区查看详情
作者|一辄@知乎 编辑| 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/703097381
点击下方卡片,关注“自动驾驶之心”公众号
戳我->*领取自动驾驶近15个方向学习路线*
>>*点击进入→自动驾驶之心『具身智能』*技术交流群
本文只做学术分享,如有侵权,联系删文
前几天听了王鹤老师的工作分享,感觉很有趣,之后有时间把论文都看一遍,现在简单记下思路
王鹤老师也是银河通用的创始人,现在银河应该融了有3个亿了。无论从具身科研主题,还是做公司来讲,技术逻辑是闭环的,故事脉络很清晰。也听说银河在做药店前置仓的取药探索
我也是具身新手上路,以下部分观点是我个人的理解,如有错误,麻烦指出讨论,谢谢!
本篇文章逻辑:
什么是具身智能 → 什么是具身智能大模型 → 王鹤老师组具身思路 → 具身感兴趣的一些点
什么是具身智能
前几天还听了圆桌讨论具身智能,主持人提的第一个问题就是它的定义。有些嘉宾提到了交互、数据等,我印象比较深的是上交的卢策吾老师提出的最简单的一个定义,具身智能就是具备身体的智能
其实也就是三维物理空间里机器人的智能。它的目标就是听从人类模糊指令做事,有一定自主性的表现。比如在家居场景下,人类坐在卧室说,我口渴了,机器人能自动到厨房的冰箱中拿一瓶可乐递给人类
应该是卢老师提的吧,有几个嘉宾坐在那里,过了几天我有点记不太清了qaq,好像记得那个讲话位置是卢老师
什么是具身智能大模型
从物理空间的角度来划分,大模型可以分为非具身大模型(Disembodied Model)、具身智能大模型(又被叫做机器人大模型)(Embodied VLA Model)。它们的区别是能否生成运动姿态(例如夹爪的末端位姿等),即是否能跟物理机器人联系起来。GPT是前者,RT是后者
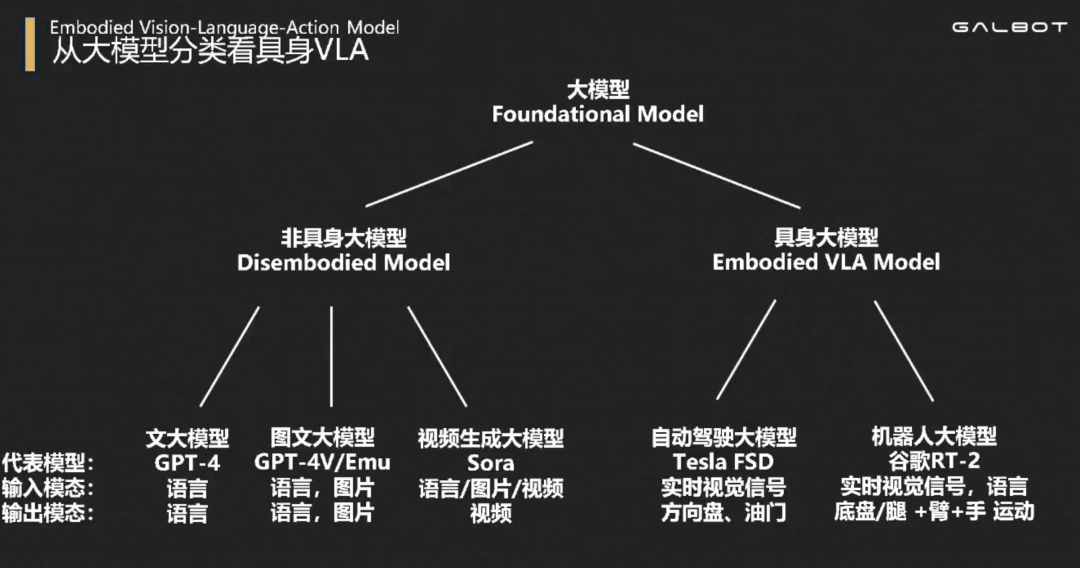
个人觉得,目前具身大模型应该可以分为两大流派。一类是RT这种端到端大模型。一类是分层具身大模型(王鹤老师组是)
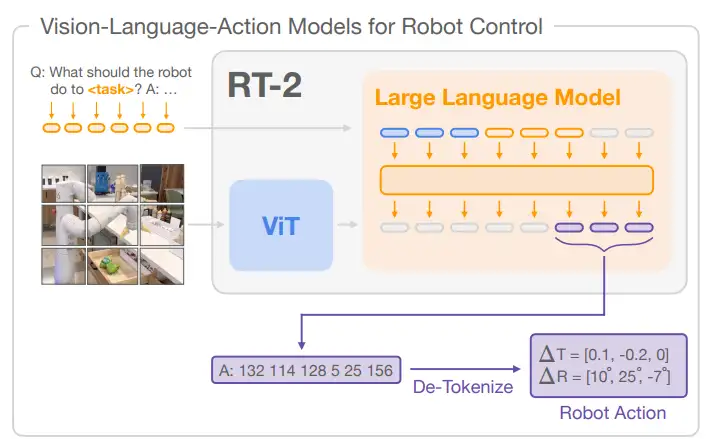
端到端具身大模型
以RT2为典型代表。输入是图像及文本指令,输出是夹爪末端动作。直接端到端地实现从人类指令到机械臂执行
但目前这类端到端的大模型有2个重要缺点:
第一,训练数据难收集,而泛化性差。谷歌花了上千万美金16个人耗时17个月收集得到了13万条厨房数据训练RT,模型在厨房表现很好,但除了厨房成功率却骤降至30%。这种泛化性难其实一定程度上也是数据采集没有做到scalable。归根到底就是数据问题
机器人数据不像当前互联网图像/文本数据那样大量而易得,更缺少机器人界自己的“ImageNet”。数据这方面是一个非常重要的研究课题,之后我会再看一些这方面的工作
可想而知,如果真正要训练一个通用具身大模型,需要的数据量级、数据收集成本、模型训练成本该多恐怖。数据是一项重要制约,所以很多研究转向了分层具身的形式
第二,推理速度慢。RT2中用到的LLM是谷歌的PaLM-E,频率1-3Hz,也就是说响应速度0.3s甚至1s
好像OpenAI和Figure合作用的是小模型,动作输出频率200Hz,还挺丝滑。这个之后我再了解一下
分层具身大模型
目前围绕做决策的大语言模型(如GPT),有许多在做工作流架构,适应机器人使用的
我觉得有两个点比较重要。其一,是需要摸清大语言模型的技术能力边界,它能干什么,不能干什么,不能干什么,不能干的部分就像人类使用工具一样,去调用传统小模型算法解决。其二,大语言模型是二维的,它基本不具备三维物理空间感知能力,也就是需要一些辅助工具来做场景理解(比如一些经典小模型)
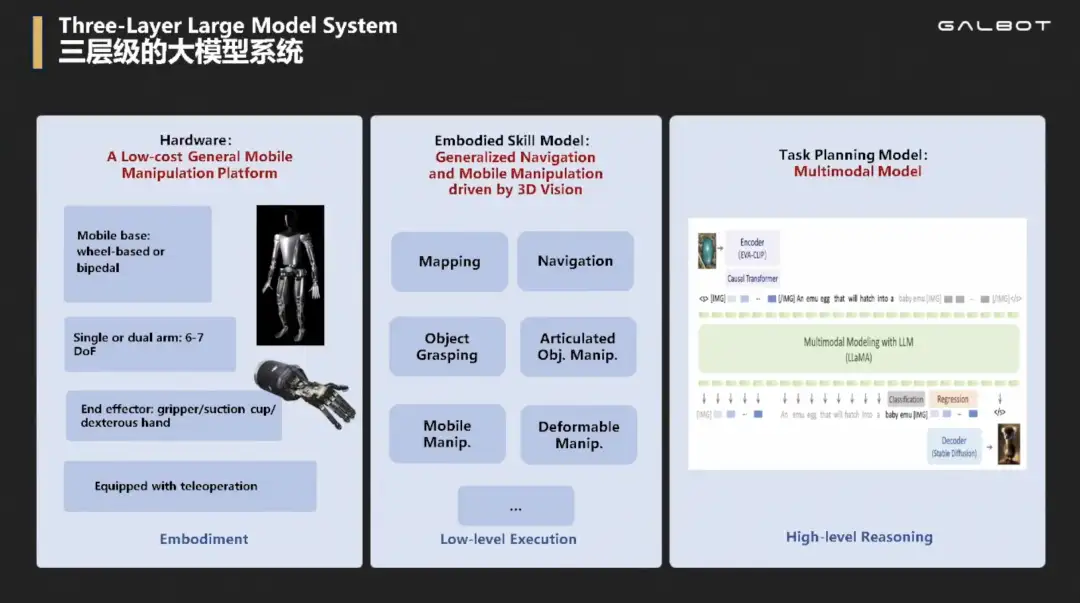
王鹤老师组的分层大模型系统
底层是硬件层,中间层是些响应快小模型(比如三维感知、自主建图、自主导航、物体抓取、开门开抽屉开冰箱、移动操作、挂衣服叠衣服、柔性物体操作等),上层是用来做推理慢的做任务规划的大语言模型LLM
当得到指令,LLM负责分析,安排调度哪个小模型API。小模型执行完后,LLM分析结果,研究下一步该怎么做。比如可以加入一些交互、结果判断等等,不同paper工作流中有所不同
例如用三维视觉小模型来弥补LLM场景理解能力差的问题。先用Grounded-SAM小模型做分割、求bbox,再将这处理后的图片扔给GPT,它就能更好地理解做出决策
孰劣孰优
目前端到端VLA性能没有达到通用的原因,是受数据制约。未来当机器人数据达到量级,也许这会是最简单、最优的通用机器人大模型数据实现路径,是一条未来之路
但当下,使用分层具身也不失为一个选择。王鹤老师在演讲中提到了一个隐藏的逻辑,没有做好小模型的公司、没有能让动作小模型泛化的公司,不可能让大模型泛化。因为大模型在单一任务上的数据需求远高于小模型。而当分层具身做得足够好,或者讲王鹤老师说得抓取、放置、柔性物体操作、关节类物体操作等小模型做得足够好,能够达到B端C端应用落地的程度,机器设备在某个场景下铺开,会收集到大量数据,跑通数据飞轮,为实现端到端VLA的训练打下坚实的基础
这是蛮有意思的一点。现在很多做具身智能、人形机器人的创业团队其实都意识到这波物理AI变革应该在智能性上,而从目前的技术道路上来看(不排除未来会出现新的通向AGI的技术方向),数据是最大的制约瓶颈。大家都想率先跑起数据飞轮,反向提升模型性能,都在讲这个故事。但大家都明白这个逻辑,能找到一条自己的道路讲清自身的优势、为什么自己的产品能铺开使用,如何达成故事闭环,这是很考验初创公司和创始人战略思维的一点
王鹤老师组工作
感觉听演讲,有两个方面。其一,就是上面提到的分层具身智能大模型的框架流程。其二,是三维数据仿真
王鹤老师2017年读博时就在做仿真研究。可以通过生成大量三维仿真数据,来训练分层具身框架里的中间小模型,让其有更好的三维理解能力。有些小模型如果用二维图像来训,也缺少一些空间信息
Figure好像用的就是二维视觉模型,很难泛化,受光照等很大影响。而三维数据能看到的是点云、物体的几何,不会受到外部环境颜色、光照、纹理等影响 目前读的论文还不多,还处在泛读和学习阶段。以下我比较感兴趣的几个点,之后想看下王鹤老师及其它国内外学者做的研究,也找找综述啥的。如果评论区朋友们能帮我指路就更感谢啦!
其一,仿真数据合成方式(及目前应对数据不足的从数据端、模型端的应对方式)
其二,分层具身这个思想在不同组的具体实现框架区别
其三,机器人大模型中对三维视觉/场景理解的部分(是二维LLM很匮乏的一点)
其四,抓取(通过海量合成数据的泛化抓取训练思路等)
其五,导航大模型(好像银河有个工作是在没有三维定位建图激光雷达,只在图片/命令下在未知环境里行走找路,也有看到一些其它相关工作)
更多资料欢迎加入『具身智能知识星球』,国庆期间我们偷偷搭建了一个全栈技术社区

① 全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

网页端官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
国内外最大最专业,近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】全平台矩阵


确定要放弃本次机会?
福利倒计时
_:_ _:_
 立减 ¥
立减 ¥
普通VIP年卡可用
立即使用
 自动驾驶之心
自动驾驶之心
关注关注


 0点赞
0点赞 
 踩
踩 

 3 收藏 觉得还不错? 一键收藏
3 收藏 觉得还不错? 一键收藏 
 0评论
0评论  分享复制链接 分享到 QQ 分享到新浪微博
分享复制链接 分享到 QQ 分享到新浪微博  扫一扫
扫一扫 
 举报 举报
举报 举报
_具身智能_ 与大模型融合创新技术实训研讨会成功举办
weixin_48649532的博客
01-25 1330
1330
2025年1月16日-19日武汉,TsingtaoAI联合北京博创鑫鑫教育科技,举行“_具身智能_ 与大模型融合创新技术”实训研讨会,本次会议面向高校AI教师和企业AI工程师群体,通过3天的技术研修和实操教学,通过将 AI 大模型与具备3D视觉的机器人相结合,为学员实践演示,带领学员深入理解通用 _具身智能_ 的原理和应用。
_具身智能_ 势不可挡!GRUtopia:首个城市级 _具身智能_ 仿真平台“浦源·桃源”
3D视觉工坊
07-26 1185
点击下方卡片,关注「3D视觉工坊」公众号选择星标,干货第一时间送达来源:3D视觉工坊添加小助理:dddvision,备注:方向+学校/公司+昵称,拉你入群。文末附3D视觉行业细分群扫描下方二维码,加入3D视觉知识星球,星球内凝聚了众多3D视觉实战问题,以及各个模块的学习资料:近20门视频课程(星球成员免费学习)、最新顶会论文、计算机视觉书籍、优质3D视觉算法源码等。想要入门3D视觉、做项目、搞科研...
参与评论 您还未登录,请先 登录 后发表或查看评论
_具身智能_——决定机器人泛化能力天花板的“大小脑”
强化学习曾小健
03-14 1035
一种基于物理身体进行感知和行动的智能系统,其通过智能体与环境的交互获取信息理解问题、做出决策并实现行动,从而产生智能行为和适应性。_具身智能_ 的实质:强调有物理身体的智能体通过与物理环境进行交互而获得智能的人工智能 _研究_ 范式。从机器人的角度出发,_具身智能_ 在机器人上的应用体现可以划分为三阶段:感知、推理、执行。
[【AI学习】[2024北京智源大会]_具身智能_:面向通用机器人的具身多模态大模型系统](https://byland.blog.csdn.net/article/details/140857974)
bylander的博客
08-02 2896
面向通用机器人的具身多模态大模型系统王 鹤 _|_ 北京大学助理教授,智源学者边听边做一些记录。
具身大模型基础二强化学习微调技术(Reinforcement Learing Fine-tuning)
2401_84494441的博客
12-25 1467
大规模行为克隆(BC)利用大量的现实世界和模拟演示数据集(如RT-1、RT-2、RT-X和SPOC)来训练高容量的策略,能够执行许多不同的任务。虽然BC策略表现出了一定的前景,但它们在直接部署到现实世界时仍然存在根本性的限制:模型只能在训练过程中观察到的状态下工作,这使得它们难以超越专家轨迹进行泛化。因此,当面对不熟悉的状态时,这些策略往往难以适应,且难以有效地从错误中恢复。
猴子选大王
A's World
03-13 700
猴子选大王(循环语句实现) 今天上数据结构课 _老师_ 让我们再次写猴子选大王的代码,仍记得上学期写这道题可把我难的,有 _思路_ 但就是 _思路_ 非常乱,代码写不好,听完 _老师_ 讲完 _思路_ 才慢慢的写出来。现在按照 _思路_ 有点bug卡了一会,不过最终还是想出来了! 下面附上题目: 一群猴子要选新猴王。新猴王的选择方法是:让N只候选猴子围成一圈,从某位置起顺序编号为1~N号。从第1号开始报数,每轮从1报到3,凡报到3的猴子即退出圈...
JS写猴子选大王
qq_36356539的博客
04-12 7767
今天 _老师_ 布置了一个作业,要求我们用js来写一个猴子选大王的代码。其实就是约瑟夫环的问题。题目为:n只猴子围坐成一个圈,按顺时针方向从1到n编号。然后从1号猴子开始沿顺时针方向从1开始报数,报到m的猴子出局,再从刚出局猴子的下一个位置重新开始报数,如此重复,直至剩下一个猴子,它就是大王。设计并编写程序,实现如下功能:(1) 要求由用户输入开始时的猴子数n、报数的最后一个数m。(2) 给出当选...
C语言 Jesephus问题 (链表链栈实现)猴子选大王
qq_44970368的博客
04-26 949
Jesephus问题 1.题目2.题目分析3.伪代码4.代码及截图检验 你的 _老师_ 留这个作业了吗? 1.题目 编程题:Jesephus问题(猴子选大王) 有n个人围一圈,从第s人开始数数,s为1,依次数到m,m出局,至最后一人为主。 要求: 用c语言编写一程序,读入n,s,m,建立一个循环链表,每个节点依次装入自然数1,2,……,n, 实现上述操作,且每一个出圈者加入同一链栈中,最后输出大王序号,及...
第4周项目5-猴子选大王
进击的葱
10-05 551